Ljubitelj napisal/-a:V tem drugem območju velja kar si napisal, je pa hitrost, pri kateri lokomotiva doseže polno moč, odvisna od prenosnega razmerja.
Od te hitrosti je vlečna sila omejena z močjo motorjev, pod to hitrostjo pa z adhezijo. Seveda je za parno lokomotivo moč lahko trajna moč kotla, ali pa moč parnega stroja in pri tem ni nobenih zobniških prenosov.
Teoretično drži, da je omejitev pod neko hitrostjo adhezija lokomotive. V praksi pa očitno ne: ES64U4 (Živa) ima pri 87t adhezijske mase 300kN vlečne sile od v=0 do v=78km/h. ER20 (Hercules) ima pri 8% nižji adhezijski masi (80t) vlečno silo manjšo kar za 21,7% (235kN v hitrostnem intervalu od v=0 do v=27km/h).
Našel sem obrazložen izračun navora trifaznega indukcijskega (asinhronega) motorja (
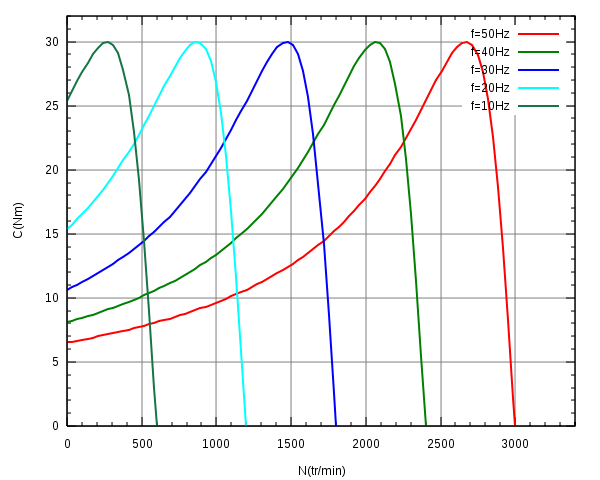
povezava). Iz tega sledi, da je maksimalni navor motorja sorazmeren s frekvenco vzbujanja ob pogoju, da regulacija drži slip motorja v vrednosti, ki ta maksimum navora omogoča. Obenem je maksimalni navor obratno sorazmeren z motorjevo reaktanco, ta pa raste s frekvenco vzbujanja. Torej je v prvem približku maksimalni navor motorja pri optimalnem frekvenčnem krmiljenju konstanten:
vir:
Wikipedija
Tudi če bi bilo možno motor s pomočjo frekvenčne regulacije vrteti poljubno hitro, pa to v realnosti najbrž ne more biti realizirano ... če drugega ne, bi pri res hitrem vrtenju postala centripetalna sila prevelika in bi lahko prišlo do poškodbe rotorja (in posledično statorja), povečevanje mehanske trdnosti rotorja pa spreminja električne karakteristike motorja. Poleg tega je pri višanju frekvence vzbujanja treba zaradi povečevanja reaktance treba povečevati vzbujevalno napetost, kar tudi ne gre preko nekih meja (izolacija električnih delov motorja, pri lokomotivah pa še električna izolacija in dimenzioniranje celotne napajalne verige od primarnega transformatorja / alternatorja do inverterja).
Kar pomeni, da ima realni frekvenčno regulirani asinhronski motor tudi neko omejitev hitrosti vrtenja. In pri tej hitrosti vrtenja mora lokomotiva dosegati konstrukcijsko maksimalno hitrost pri kateri mora imeti lokomotiva še vedno neko omembe vredno vlečno silo če naj pri svoji maksimalni hitrosti (in seveda moči - ki omejuje navor VM pri tej hitrosti) vleče nek vlak. Od tod sledi prestavno razmerje med motorjem in kolesno dvojico.
Po tem pa pridemo do vprašanja zmogljivosti vira električne energije. Pri DC lokomotivah je v igri vsaj inverter, pri AC lokomotivah pa vsaj glavni transformator in usmernik ter na koncu tudi inverter. Pri dizlih so v verigi kajpada dizel motor ter alternator, usmernik in inverter. Celotne verige pri posameznih tipih lokomotiv igrajo podobno vlogo kot parni kotel pri parnih lokomotivah, torej omejitev celotne moči lokomotive - četudi bi motor, ki proizvaja mehansko delo na kolesih (elektromotor ali parni stroj), zmogel od sebe dati še več.
Še enkrat: glede na to, da imajo realni motorji končen navor, ki je v idealnem primeru konstanten v večjem območju vrtljajev, je vlečna sila lokomotive še kako odvisna od prenosnega razmerja med VM in kolesnimi dvojicami.
Umen konstruktor bo kajpada poskrbel, da bo pri nizkih hitrostih vlečna sila dosegala večji del z adhezijsko silo pogojenega trenja med gnanimi kolesi in tirnico, lahko pa da zaradi drugih zahtev tega ne dosega. Moja špekulacija glede tega, zakaj je pri Herculesu razmerje vlečna sila : teža lokomotive slabša kot pri Živi: ker je Hercules močno omejen z močjo dizelskega motorja in zahteve, da kljub temu dosega dokaj visoko končno hitrost, je pri večini hitrosti (in v eksploataciji večino časa) omejitev moč DM. Torej nima smisla vgrajevati večjih VM ki bi bili sposobni višjega navora pri nizkih hitrostih (pod 27 km/h, kar je smešno nizka hitrost za normalne Evropske proge), raje so prihranili kakšno tono ali dve pri celotni teži (tako je lokomotiva sposobna vožnje po progah kategorije C) na račun nekaj nižje vlečne sile.






